15gan 汽车自动驾驶工夫:端到端智驾
发布日期:2025-04-22 01:14 点击次数:166

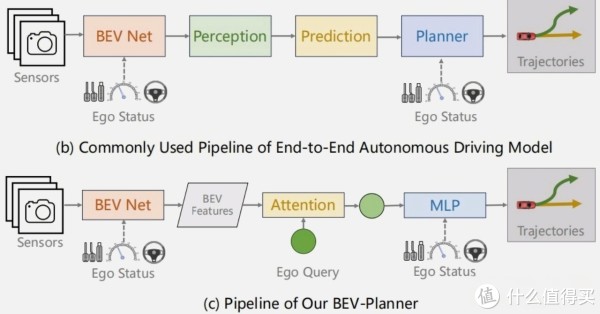
浅聊一下现时的智驾的一项工夫。端到端(End-to-End,E2E)智驾是一种基于深度学习的自动驾驶工夫框架15gan,其中枢在于用一个长入的AI模子平直措置原始传感器数据,并输出车辆终结辅导。输入端包括录像头、激光雷达、毫米波雷达等传感器汇注的环境信息,以及车辆自己的现象,输出端平直生成标的盘转角、油门/刹车力度等驾驶看成,中间无需东说念主为分割感知、决策、筹备等模块。
传统模块化架构,感知模块识别说念路信息→决策模块按预设规章筹备旅途→终结模块扩充看成。延伸高,模块间数据传递耗时,导致车辆反馈慢。规章僵化,依赖东说念主工编码应付场景,难以秘密悉数顶点情况。信息损耗大,各面孔孤立优化,无法完了全局最优。

端到端的上风。单模子整合,通过大模子平直学习“输入-输出”映射筹备,省去中间面孔。举例特斯拉FSD V12输入录像头画面,平直输出转向角度。数据驱动,模子通过海量东说念主类驾驶视频学习驾驶战略,而非依赖东说念主工规章。举例小鹏XNGP用超1000万段竟然路况视频历练模子。拟东说念主化驾驶,效法东说念主类司机的“直观反应”,完了生动变说念、预判行东说念主轨迹。

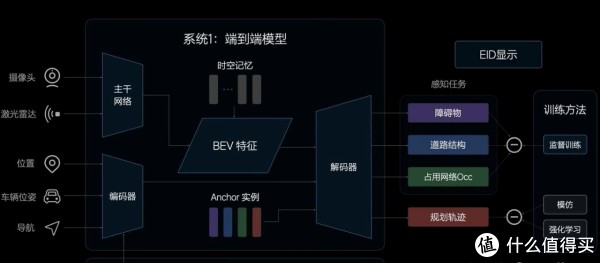
国内车企的端到端工夫门路分为两大门户。“一段式”端到端,秉性是感知、决策、筹备全进程整合为单一神经汇集,数据驱动效果高,但需要海量数据和高算力撑执。代表企业:商汤科技、Momenta、智己汽车。上风是能应付未界说阻截物,举例瞬息滚落的轮胎或异形物体,系统可自主生成灭亡战略。缺陷是黑箱问题超过,调试难度大;算力资本高,举例特斯拉FSD V12历练资本达80亿元。
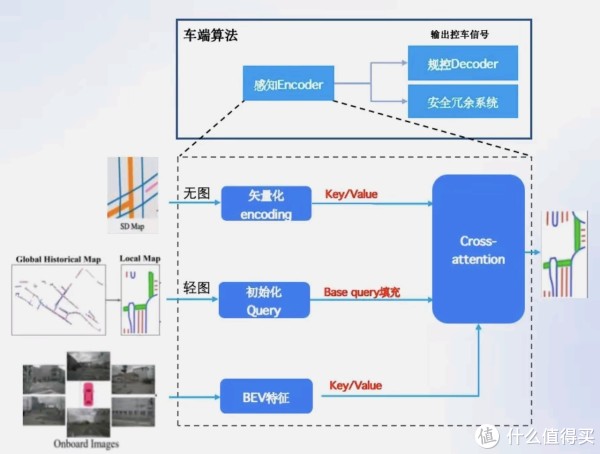
“两段式”端到端,秉性是感知与规控分阶段措置,模块化联想便于优化和考证。代表企业:华为、小鹏、百度Apollo。上风是裁减建筑复杂度,稳健数据积贮不及的车企快速上车。举例小鹏XNGP通过XNet(感知)、XPlanner(规控)、XBrain(领略)三模块协同,完了拟东说念主化驾驶。部分车企(如蔚来)办法迟缓从两段式过渡到一段式,通过云表算力进步模子整合材干。
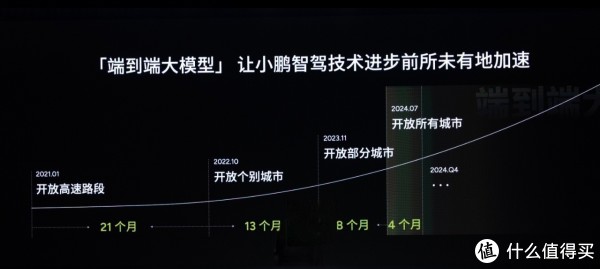
小鹏汽车,国内首个端到端详产决策(XNet+XPlanner+XBrain),声称“每2天迭代一次模子”,18个月内智驾材干进步30倍。2024年7月推送XOS 5.2.0版块,完了“世界不限城市、门路、路况”的XNGP秘密。2024年研发插足35亿元,办法2025年完了类L4级体验。
华为工夫架构,ADS 3.0采选“端到端仿生大脑”,整合激光雷达、毫米波雷达等多传感器,完了车位到车位全场景秘密。支执无图城区NCA(红绿灯识别、无保护左转),防误踩加快踏板工夫裁减东说念主为事故风险。2025年运行高速L3级试点,2026年鼓舞城区L3商用。
吉吉影音av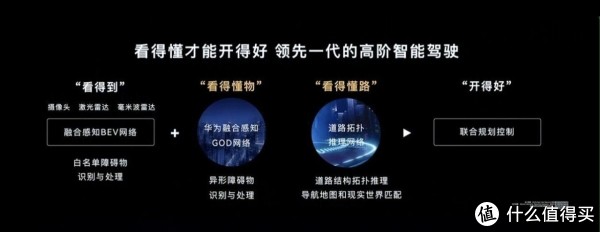
地平线,SuperDrive系统集会征途6计较硬件,动态、静态、占用汇集三网合一,进步感知精度和博弈材干。拥挤场景变说念收效力进步50%,路口通行效果进步67%。2024年第四季度推出程序决策,2025年第三季度首款搭载车型托付。

蔚来,休养智驾团队架构,澌灭感知与规控部门,办法2025年推出端到端决策。理思,研发“端到端+VLM+生成式考证系统”,2024年底推送支执复杂路口措置的智驾版块。

国内车企在端到端赛说念已造成“头部领跑、腰部追逐”的风物:小鹏、华为以全栈自研霸占工夫高地,地平线通过怒放生态赋能中小玩家,而数据与算力的武备竞赛将加快行业洗牌。2025年或成为分水岭——届时高阶智驾渗入率或超40%,而能否进步“数据-算力-场景”三重门槛,也许将决定谁能最终胜出。
背面更新的著作15gan,再聊聊汽车自动驾驶工夫的其他标的。